-
 大学概要
大学概要
-
 学部・大学院・専攻科
学部
学部・大学院・専攻科
学部- 地域創生学部
- 生物資源科学部
- 保健福祉学部
大学院・専攻科- 総合学術研究科
- 経営管理研究科・HBMS
- 助産学専攻科
-
 学生生活・就職支援
学生生活・就職支援
- 学生生活
- 就職支援
-
 研究・地域連携・国際交流
研究・地域連携・国際交流
-
 入試情報
入試情報
- 学部入試
- 専攻科入試
- 大学院入試
- 出願・合格発表・入学手続
- 大学説明会
- オープンキャンパス
- キャンパス見学
- 進学相談会
- 県大へ行こう-授業公開週間-
- 高大接続・連携事業
- 「受験上の配慮」等について
- 特例措置について
- 入学者選抜試験における個人成績の開示
- 就職・キャリア支援
- 授業料・奨学金・保険
- 科目等履修生・聴講生・研究生
- パンフレット
本文
重丸 伸二(しげまる しんじ)
研究者紹介
所属:地域創生学部情報学科 職位:准教授 学位:博士(経営情報学)
研究室:県立広島大学広島キャンパス1640研究室
E-mail:shige@(@の後に を付けて送信ください)
を付けて送信ください)
研究内容:https://researchmap.jp/read0083890
研究に関する自己PR
一般に制御対象を数学的モデルで完全に表現することは困難であり,何らかの誤差や不確かさが存在します。本研究室では,システム内にそのような不確かさがあってもシステムを安定化できるようなロバスト制御手法について研究しています。
研究テーマ
大規模システムの分散制御,入力部に構造的制約をシステムの制御,マルチエージェントシステムの協調制御
研究の特徴・内容
システム内に存在する不確かさとして,モデリング誤差,計測誤差,線形化誤差などがあります。本研究室では,システムを記述するモデルにおいてパラメータなどが直接把握できない場合などを考慮し,様々な不確かさにおける未知パラメータに対して,それを推定する適応則を構成し,制御則に組み込むことによって,それらの情報を必要としない制御則の構成法について研究しています。
受験を検討している方々へ
制御理論を用い制御では,(1)モデリング,(2)制御則設計,(3)実装,(4)制御の順番で制御器を構成します(図1)。しかし,(1)モデリングのプロセスにおいて実際の制御対象を,数理モデルによって完全には表現することは困難であり,それらの間には不確かさが存在します。そこで,本研究室では数理モデルでは厳密に表現できない様々な不確かさを考慮したロバスト(=頑丈)な制御手法を開発し,実際の制御問題への適用可能性が広がるように制御理論の拡張を行っています。
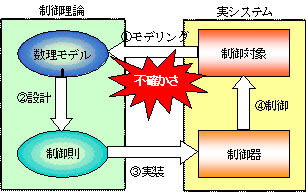
図1制御則設計の流れ
連携協力を検討している方々へ
現在は,モデルベース開発を念頭に置いた制御則の提案や制御モデルにおける前提条件の緩和など,制御理論の拡張を行っています。
これまでの主な研究テーマは以下のとおり。
動的システムの安定性解析
・不確かさをもつシステムの安定性解析
・大規模システムの安定性解析
ロバスト制御則設計
・不確かさをもつシステムのロバスト安定化
・適応ロバスト制御
・モデル追従制御
・大規模システムの分散制御
・入力部に構造的制約をシステムの制御
・マルチエージェントシステムの協調制御
制御システムの数値シミュレーション
・河川水質管理システムの制御
・連結倒立振子の安定化制御
論文リスト
著書
キーワード
ロバスト制御,適応制御,分散制御,動的システム,安定性,不確かさ
関連するSDGs項目



- 広島県公立大学法人グループサイト


Copyright © 2020 Prefectural University of Hiroshima. All Rights Reserved.